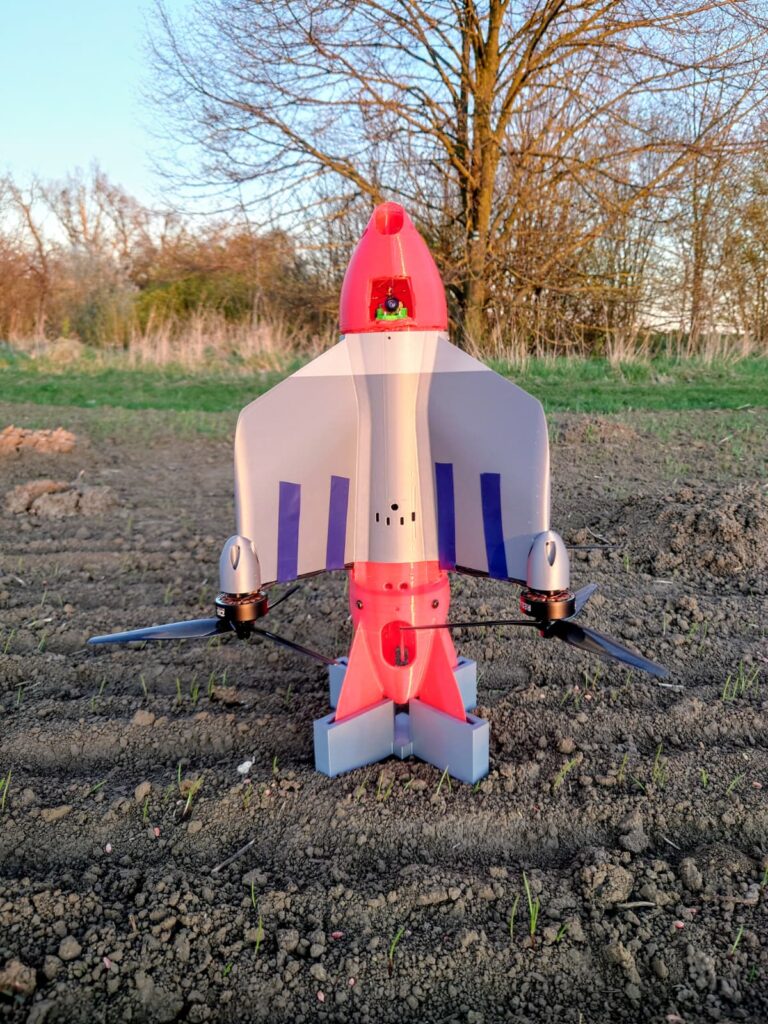
Představím zde svůj soukromý malý projekt plně autonomního interceptoru s AI, na kterém už od minulého roku občas pracuji po večerech. Cílem je levný interceptor, který zvládne ovládat úplně každý a pro jeho použití nejsou potřeba žádné zkušenosti s létáním FPV dronu.
Jedná se o interceptor, který buď startuje z boxu (tedy může být klidně umístěný mimo dosah operátora, ale to je otázka další verze), nebo se vypouští z ruční startovací pistole. Operátor na LCD vidí obraz, který vidí interceptor, zamíří na letící cíl, potvrdí volbu a tím se spustí plně autonomní režim startu a navedení na cíl, tedy řešení typu „vystřel a zapomeň“, kdy se cíl zamkne a interceptor letí bez dalšího řízení, takže jej nelze rádiově rušit. Inspirací v tomto směru byl systém Yolka.

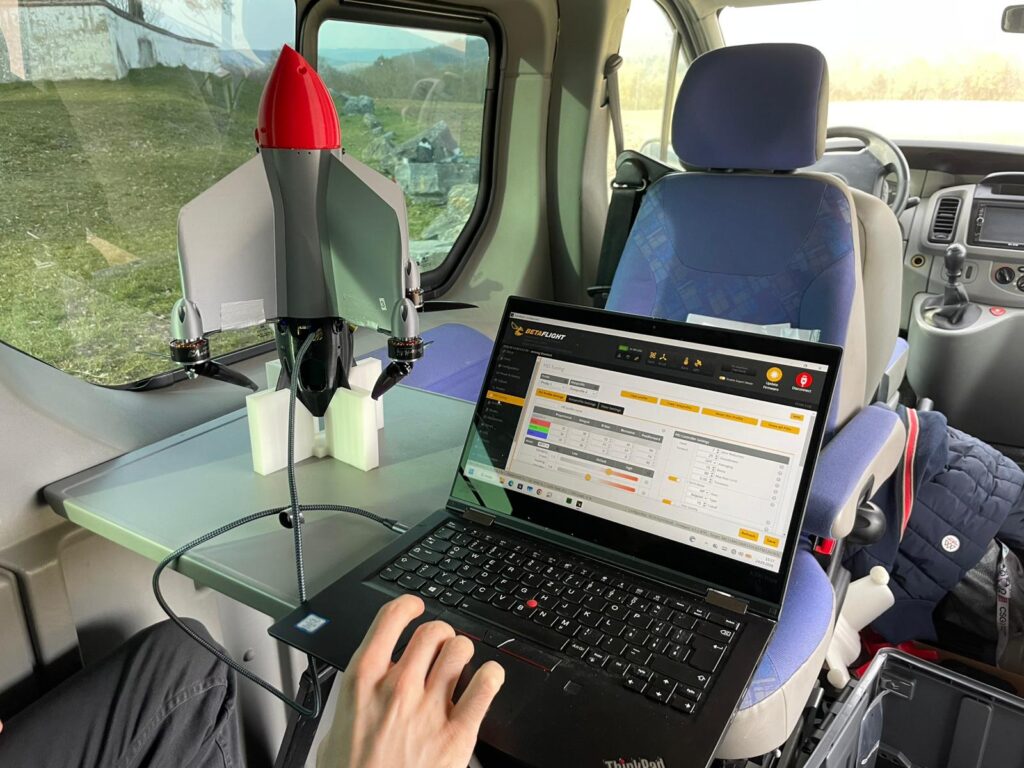
Koncepce není jen o samotném kinetickém interceptoru, ale hlavně o elektronice a jejím rozhraní, které pak půjde instalovat do různých dronů a upravit vše na míru, ať už pro ArduPilot nebo Betaflight. Tělo dronu je celé z 3D tisku a kromě klasické sestavy FC a ESC je v dronu také Raspberry Pi a AI akcelerátor Hailo-8 pro lepší a rychlejší targetování a rozpoznávání cíle.
Od začátku počítám s tím, že kromě běžného zaměření cíle bude možné upřesnit i to, na jaké místo se má zacílit, když se dron dostane do větší blízkosti. Dokáže pak zamířit například na zadní část tanku nebo u stojícího letadla na spojovací část mezi trupem a křídlem, zkrátka podle toho, co se nahraje nebo vybere z možností.
Celý software je navržený kontejnerově, takže bude možné volit nejen targetovací model (například podle počasí, použité CV metodiky nebo typu cíle), ale také způsob upřesnění cílení. Zároveň bude možné definovat i to, co má systém provést při zásahu, případně jak se má zachovat při nesplnění mise.
Na EUDIS Defence Hackathon 2026 jsem zatím prezentoval pouze 1. a 2. generaci, které létají čistě na ruční ovládání a částečně komunikují s Raspberry Pi 5. Už nyní by ale mohly fungovat jako běžně ovládaný FPV interceptor. Hlavním cílem je však pilota z procesu co nejvíce odstranit a právě v oblasti targetování se mezitím podařilo udělat velký posun.
Na tom teď dál pracuji a už proběhl další výrazný posun. Věřím, že brzy napíšu o 3. generaci, která už létá, nebo rovnou o 4. generaci. V hlavě mám ještě řadu dalších nápadů na zlepšení, která budu postupně promítat do dalších generací, ale bohužel to chce hodně času, kterého není tolik, kolik bych potřeboval, takže postup není tak rychlý, jak bych si přál.

Mezi fotky jsem přidal i pár nehod, aby to nevypadalo, že je všechno jen růžové. Nebudu lhát, počet rozbitých těl dronu se už blíží desítce, včetně 3. generace. Ze shořelé elektroniky jsem na tom dobře, zatím odnesla jedna sada motorů, 1x ESC, 1x FC, a mnoho dalších věcí a vrtule se počítají už na desítky kusů 🙂